Autormi článku sú Ing. Michal Poliačik,PhD., Ing. Zlatko Záhoran, Ing. Michal Podlucký -EkoWatt, s.r.o.
ABSTRAKT
V tomto článku je v krátkosti zhrnutý vývoj senzora polohy do priemyselných prostredívysokých tlakova teplôt. Tento senzor bol podrobený sériám meraní v skúšobnej tlakovej komore, v ktorej sa takéto podmienky dajú dosiahnuť. Vhodnou konštrukciou a použitými materiálmi,ako aj technológiou výroby sme dosiahli, že vlastnosti senzora sa ani v takýchto tvrdých podmienkach nemenia.
1.Úvod
V rámci riešenia problémov pre senzorické systémy do priemyselných prostredí s vysokými teplotami a tlakmi bolo nevyhnutné riešiť aj problematiku snímania polohy v takýchto prostrediach, kde tlak a teplota dosahujú hodnoty až 1000 barov a 300 C. Po prieskume vhodných riešení sme dospeli k záveru, že takéto odolné senzory pre požadované tlaky do 1000 barov prakticky neexistujú. Preto bol potrebný výskum a vývoj takéhoto senzora a rovnako bolo nevyhnutné zabezpečiť aj zariadenie, ktoré by umožňovalo takéto podmienky vytvárať- skúšobnú vysokotlakovú a vysokoteplotnú komoru schopnú vytvoriť prostredie s tlakom vody až 1200 barov a teplotou do 450℃ (HPHT – High Pressure High Temperature).
2. LVDT snímač polohy
Analýzou existujúcich riešení sme dospeli k záveru, že na podobné účely sa javí ako najvhodnejší LVDT snímač (LVDT-Linear Variable Differential Transformer), ktorý sa v podobných aplikáciách aj pomerne často používa, a to z dôvodov odolnosti na okolitéprostredie. Existujúce priemyselné riešenia sú síce navrhované tak, aby odolávali zvýšenej úrovni elektomagnetického rušenia a prostrediu s nečistotami, ale len veľmi málo z nich je určených aj do vyšších tlakov a teplôt. Pri týchto nepriaznivých vplyvoch dochádza k značnému skresleniu meraných hodnôt, ktoré je spôsobené zmenou charakteristických vlastností použitých materiálov (hlavne magnetické vlastnosti jadra),alebo k úplnému zlyhaniu či zničeniu senzora. Z týchto dôvodov bol pre senzor polohy vybratý práve indukčný princíp, pričom lineárne senzory polohy pracujúce na tomto princípe sú známe z literatúry už dlhú dobu [1].
Konštrukcia tohto senzora bola dimenzovaná tak, aby bol vhodný do požadovaných priemyselných prostredí s vysokým tlakom a vysokou teplotou (1000 barov,300 ℃) a aby tak odstránila spomínané nedostatky existujúcich riešení, ktoré sú nedostatočné z hľadiska dnešných potrieb. Tieto tlaky a teploty sa očakávajú v drsných priemyselných prostrediach.Robustnosť senzora voči uvedeným vplyvom je zaručená použitím vysokopevnostného konštrukčného materiálu s hladkou povrchovou úpravou a takisto fyzikálnym princípom samotného senzora, ktorý je umiestnený vnútri obalu. Vinutia senzora sú tienené kovovým telom obalu a tak sú chránené voči mechanickým vplyvom aj vplyvom elektromagnetického žiarenia ostatných zariadení. Odolnosť je takisto zvýšená diferenčným zapojením cievok.Na rozdiel od klasického riešenia, kde primárna cievka je nepohyblivá a vzájomnú indukčnosť’je možné meniť pohybom feromagnetického jadra, naše riešenie sa zakladá na pohyblivej primárnej cievke, pričom potreba jadra je tak odstránená. Týmto je možné značne zmenšiťvplyv zmien tlaku a teploty na funkčnosť senzora. Senzor je konštruovaný tak, aby cez otvory v komore mohla vniknúť kvapalina a zaplaviť senzor aj zvnútra. Vďaka tomuto vyrovnaniu tlakov je senzor možné nasadiť aj do prostredia s veľmi vysokými tlakmi. Elektromagnetickévlastnosti senzora boli simulované v prostredí Ansys (Obr. 2.) a následne bola konštrukcia upravovaná, aby spĺňala naše požiadavky. Zostava senzora je znázornená na obr.1.
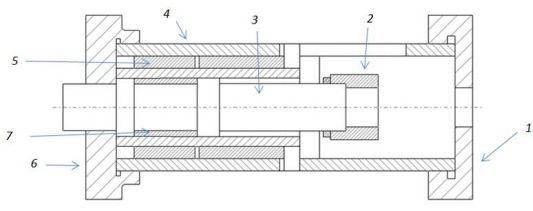
Obr.1.:Zostaa senzora polohy (1,6-príruba,2-upevnenie tiahla,3 – pohyblivá čast‘- jadro,4-telo snímača,5- primárne vinutie, 7- sekundárne vinutie)
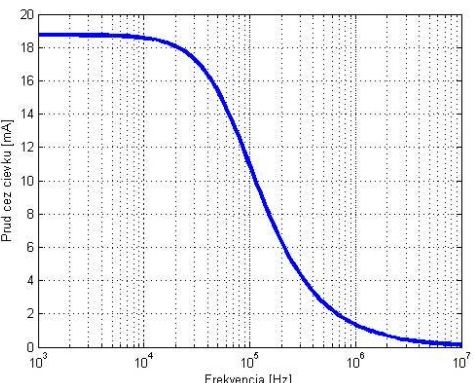
Obr.2: Simulácie primárneho vinutia cievky senzora
Takto zostavený snímač polohy sme podrobili sérii meraní v HPHT komore, pričom pre spracovanie signálu zo snímača sme použili špeciálny obvod určený na túto aplikáciu od firmy Analog Devices -AD698 [2].
3. Meracie pracovisko-skúšobná tlaková komora (HPHT)
Navrhnutý senzor polohy bol podrobený skúškam v skúšobnej tlakovej komore HPTC130-300,kde je možné simulovať požadované priemyselné prostredia – teda prostredia vysokého tlaku (1200 barov) a vysokej teploty (450℃). Zostava tohto zariadenia je znázornená na obr. 3.
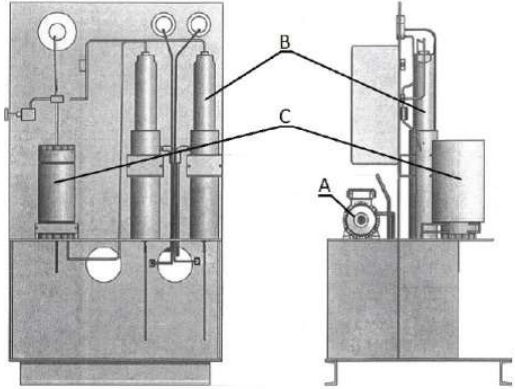
Obr.3.: Zostava skúšobnejtlakovej komory HPTC130-300
(A-Olejové čerpadlo, B-multiplikátory,C-tlaková komora )
Hlavnou častou tohto zariadenia je komora C (Obr. 3), ktorá je vyrobená z vysokokvalitnej nerezovej ocele a vzhľadom na to, že sa jedná o vyhradené tlakové zariadenie a najkritickejšiu časť celého zariadenia, má aj príslušný certifikát TÜV pre vysokotlakovézariadenia. Na povrch tejto komory je možné nasadiť odporový ohrev 10kW s regulátorom a tak vo vnútri vytvoriť prostredie s požadovanou teplotou 450℃. Pre vytvorenie vysokého tlaku slúži sústava olejového čerpadla (A) a dvoch multiplikátorov (B). Olejové čerpadlo (A)vytvára v nízkotlakovej časti multiplikátora tlak oleja do cca 200 barov, pričom na vysokotlakovej časti (multiplikátor slúži ako násobič tlaku) vzniká tlakaž 1200 barov už v požadovanom vodnom prostredí. Súčasťou aparatúry sú aj potrebné armatúry, manometre a bezpečnostný ventil.
Problém, ktorému bolo nutné venovať pozornosť pri experimentoch je vznik tzv. subkritickej vody pri vysokom tlaku a teplote. Ak sa totiž voda vyskytuje nad určitou úrovňou tlaku a teploty zároveň, vzniká najprv subkritická a pri veľmi vysokých teplotách až superkritickávoda, ktorá spôsobuje extrémne zrýchlenú degradáciu aj vysokokvalitných materiálov (preniká ľahko aj do kryštalickej mriežky ocele). Túto skutočnosť treba mať pri experimentoch na zreteli, a preto nesmieme pri súčasnom zvyšovaní tlak na najvyššiu úroveň presiahnuť teplotu cca 150 ℃, pretože by dochádzalo k veľmi rýchlemu poškodzovaniu zariadenia. Preto sme pre potreby našich testov a simulácií pracovali s teplotou do 110C, čím sme sa, v pre nás v dostatočnejmiere, priblížili k drsným priemyselným prostrediam. Fotografia zariadenia je na obr.4.



Obr.4.: Skúšobná tlaková komora
4.Výsledky merania
V experimentálnom prostredí skúšobnej vysokotlakej a vysokoteplotnej komory bolo vykonaných niekolko experimentov, ktoré preukázali funkčnosť demonštrátora senzora polohy pri požadovaných extrémnych podmienkach. Vykonali sme merania senzora polohy pri pohybe tiahla smerom nahor a nadol podla normy STN EN 60 770. Výsledné charakteristiky sú znázornené na obr. 5. Pri meraní sme najskôr zvyšovali teplotu v komore,čo v uzavretom vodnom systéme spôsobovalo aj zvýšenie tlaku (preto je v grafe uvedenýrozsah tlakov). Pri dosiahnutí maximálnej teploty sme umelo zvýšili tlak na požadovanúúroveň 1000 barov. Presný postup merania v HPHT komore je popísaný v metodike merania [3].
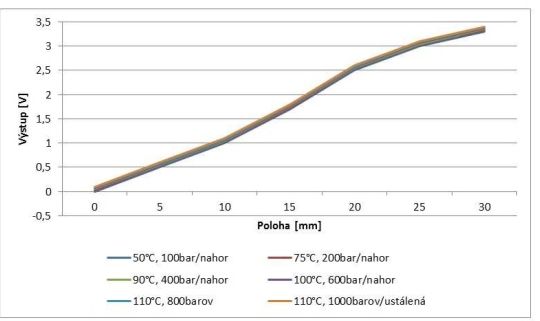
Obr.5.:Namerané charakteristiky senzora polohy v extrémnych podmienkach
Zmena charakteristiky senzora vplyvom súčasného pôsobenia vysokej teploty aj tlaku je len veľ’mi malá, aj to len na okrajoch jeho meracieho rozsahu. Treba poznamenať, že mierne zakrivenie charakteristík senzora nie je závadou, pretože sa dá jednoduchým spôsobom linearizovať v rámci spracovania signálu vo vyhodnocovacích obvodoch (mikroprocesor,nadradený spracovateľský systém a pod.). Dôležitá je najmä ich stabilita a nemennosť pri zmene podmienok, čo bolo splnené. Tieto merania potvrdzujú správnosť návrhu senzora polohy a jeho schopnosť odolávať požadovaným podmienkam s vysokou teplotou a vysokým tlakom.
5.Záver
Experimenty so senzorom polohy v skúšobnej tlakovej komore potvrdili vhodnosť‘ nášho návrhu pre priemyselné prostredia s vysokým tlakom a vysokou teplotou. Senzor nevykazoval žiadne extrémne zmeny svojich vlastností. Testovanie bolo vykonávané na špeciálnej skúšobnej tlakovej komore HPHT, ktorá slúži na simulovanie extrémnych podmienok vysokých tlakov a teplôt, čo umožňuje testovať rôzne komponenty vyvíjané pre potreby senzorického systému do takýchto prostredí.
6. Pod’akovanie
Príspevok vznikol v rámci riešeného projektu OP VaV s názvom ,,Odolný senzorický systém do priemyselných prostredí s vysokými tlakmi, teplotami a vysokým stupňom elektromagnetického rušenia“, s kódom ITMS 26240220037, spolufinancovaný zo zdrojov Európskeho fondu regionálneho rozvoja. Podporujeme výskumné aktivity na Slovensku/Projekt je spolufinancovaný zo zdrojov EÚ.
Použitá literaúra
[1] Göpel,W., Hesse, J., Zemel, J.N. (1989). Sensors – A Comprehensive Survey. Volume 5-Magnetic Sensors. VCH Verlagsgesellschaft mbH. ISBN 3-527-26771-9
[2] AD698-datasheet, dostupné na www.analog.com[19.03.2013]
[3] Metodika merania senzora polohy v HPHT komore – interný dokument firmy EkoWatt,s.r.o.